Cahier des charges application PDA¶
Introduction¶
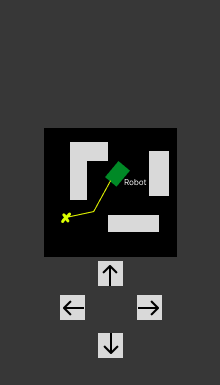
Cette application permet de contrôler et observer le mouvement d'un robot dans un plan simulé. Sur la PWA, on trouve un canvas avec le plan du robot, 4 boutons directionnels (avant, arrière et pour tourner le robot) et la possibilité pour le robot d'atteindre un endroit du plan lorsqu'on clique sur un quelque part sur le plan. Le robot communiquera en WebSockets avec Socket.IO pour mettre à jour sa position et sa rotation sur le plan.
Utilisation¶
- L'utilisateur accède la page via la PWA
- Il peut voir l'état du robot dans le plan et le contrôler
- 4 boutons pour diriger le robot
- Pathfinding vers un chemin lorsqu'on clique sur le canvas
Difficultés techniques¶
- Simuler un espace pour le robot
- Envoyer les données du robot à la PWA
Technologies¶
- Trello
- Python
- Flask
- Pygame: Simulation du robot
- Pymunk: Gestion de la physique du robot
- HTML, CSS, JavaScript
- Socket.IO
Planification¶
-
3 semaines pour réaliser la PWA
- Créer la page web responsive
- Initialiser la PWA
- Créer manifest
- Créer service worker
- Ajouter le canvas qui contient l'état du robot
- Envoyer la position d'un appui sur le canvas via Socket.IO
- Ajouter les boutons de contrôle directionnel du robot
-
5 semaines pour réaliser l'application python qui communique avec la PWA
- Ajout d'obstacles
- Simulation de robot
- Communication avec Socket.IO
- Pathfinding